Dijkstra's Algorithm
Dijkstra's Algorithm is a popular algorithm used for finding the shortest paths between nodes in a graph. This tutorial will cover the basics of Dijkstra's Algorithm, its applications, and how to implement it in Python, Java, C++, and JavaScript. We will also delve into various optimizations and advanced use cases.
Introduction to Dijkstra's Algorithm
Dijkstra's Algorithm was conceived by computer scientist Edsger W. Dijkstra in 1956. It is used to find the shortest path from a starting node to all other nodes in a weighted graph, where the weights represent the cost to traverse from one node to another.
How Dijkstra's Algorithm Works
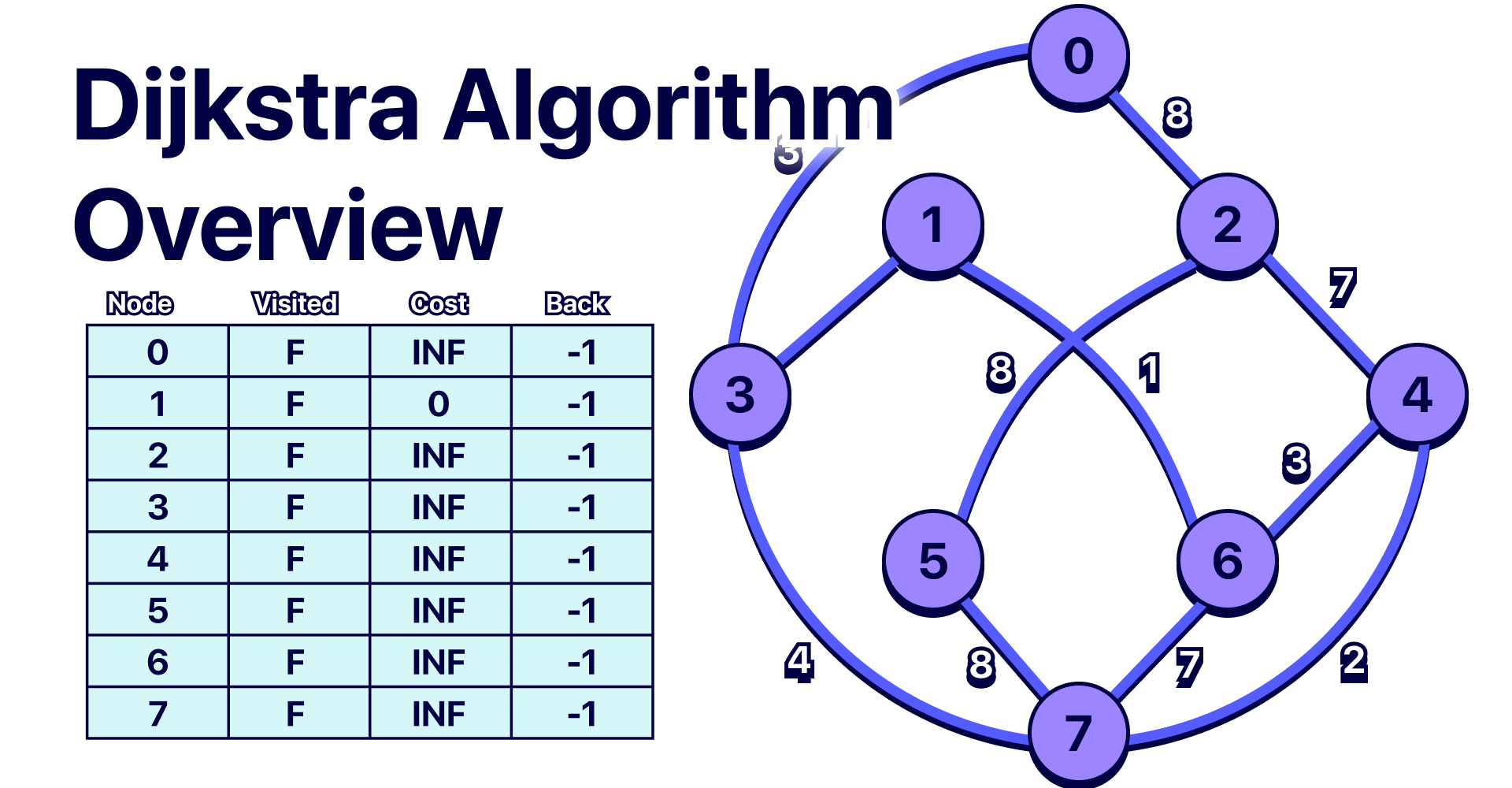
- Initialization: Start with a set of nodes. Assign a tentative distance value to every node: set it to zero for the initial node and to infinity for all other nodes. Set the initial node as the current node.
- Visit Neighbors: For the current node, consider all its unvisited neighbors and calculate their tentative distances. Compare the newly calculated tentative distance to the current assigned value and assign the smaller one.
- Mark Visited: Once all neighbors are visited, mark the current node as visited. A visited node will not be checked again.
- Select Next Node: Select the unvisited node that is marked with the smallest tentative distance and set it as the new current node.
- Repeat: Continue the process until all nodes have been visited.
Pseudocode for Dijkstra's Algorithm
Here is the pseudocode for Dijkstra's Algorithm:
function Dijkstra(Graph, source):
create vertex set Q
for each vertex v in Graph:
dist[v] ← INFINITY
prev[v] ← UNDEFINED
add v to Q
dist[source] ← 0
while Q is not empty:
u ← vertex in Q with min dist[u]
remove u from Q
for each neighbor v of u:
alt ← dist[u] + length(u, v)
if alt < dist[v]:
dist[v] ← alt
prev[v] ← u
return dist[], prev[]
Implementing Dijkstra's Algorithm
- Python
- Java
- Cpp
- JavaScript
import heapq
def dijkstra(graph, start):
priority_queue = [(0, start)]
distances = {vertex: float('infinity') for vertex in graph}
distances[start] = 0
previous_nodes = {vertex: None for vertex in graph}
while priority_queue:
current_distance, current_vertex = heapq.heappop(priority_queue)
if current_distance > distances[current_vertex]:
continue
for neighbor, weight in graph[current_vertex].items():
distance = current_distance + weight
if distance < distances[neighbor]:
distances[neighbor] = distance
previous_nodes[neighbor] = current_vertex
heapq.heappush(priority_queue, (distance, neighbor))
return distances, previous_nodes
def shortest_path(graph, start, goal):
distances, previous_nodes = dijkstra(graph, start)
path = []
while goal:
path.append(goal)
goal = previous_nodes[goal]
return path[::-1]
graph = {
'A': {'B': 1, 'C': 4},
'B': {'A': 1, 'C': 2, 'D': 5},
'C': {'A': 4, 'B': 2, 'D': 1},
'D': {'B': 5, 'C': 1}
}
print(shortest_path(graph, 'A', 'D'))
import java.util.*;
public class Dijkstra {
public static void dijkstra(Map<String, Map<String, Integer>> graph, String start) {
PriorityQueue<Node> priorityQueue = new PriorityQueue<>(Comparator.comparingInt(node -> node.distance));
Map<String, Integer> distances = new HashMap<>();
Map<String, String> previousNodes = new HashMap<>();
for (String vertex : graph.keySet()) {
distances.put(vertex, Integer.MAX_VALUE);
previousNodes.put(vertex, null);
}
distances.put(start, 0);
priorityQueue.add(new Node(start, 0));
while (!priorityQueue.isEmpty()) {
Node current = priorityQueue.poll();
if (current.distance > distances.get(current.name)) {
continue;
}
for (Map.Entry<String, Integer> neighbor : graph.get(current.name).entrySet()) {
int distance = current.distance + neighbor.getValue();
if (distance < distances.get(neighbor.getKey())) {
distances.put(neighbor.getKey(), distance);
previousNodes.put(neighbor.getKey(), current.name);
priorityQueue.add(new Node(neighbor.getKey(), distance));
}
}
}
for (Map.Entry<String, Integer> entry : distances.entrySet()) {
System.out.println(entry.getKey() + " : " + entry.getValue());
}
}
public static List<String> shortestPath(Map<String, Map<String, Integer>> graph, String start, String goal) {
dijkstra(graph, start);
List<String> path = new ArrayList<>();
for (String at = goal; at != null; at = previousNodes.get(at)) {
path.add(at);
}
Collections.reverse(path);
return path;
}
public static void main(String[] args) {
Map<String, Map<String, Integer>> graph = new HashMap<>();
graph.put("A", Map.of("B", 1, "C", 4));
graph.put("B", Map.of("A", 1, "C", 2, "D", 5));
graph.put("C", Map.of("A", 4, "B", 2, "D", 1));
graph.put("D", Map.of("B", 5, "C", 1));
System.out.println(shortestPath(graph, "A", "D"));
}
static class Node {
String name;
int distance;
Node(String name, int distance) {
this.name = name;
this.distance = distance;
}
}
}
#include <iostream>
#include <vector>
#include <unordered_map>
#include <queue>
#include <stack>
#include <limits>
#include <algorithm>
using namespace std;
typedef pair<int, int> Node;
typedef unordered_map<string, unordered_map<string, int>> Graph;
unordered_map<string, int> dijkstra(const Graph& graph, const string& start, unordered_map<string, string>& previousNodes) {
unordered_map<string, int> distances;
for (const auto& node : graph) {
distances[node.first] = numeric_limits<int>::max();
}
distances[start] = 0;
auto cmp = [](Node left, Node right) { return left.second > right.second; };
priority_queue<Node, vector<Node>, decltype(cmp)> priorityQueue(cmp);
priorityQueue.push({start, 0});
while (!priorityQueue.empty()) {
string current = priorityQueue.top().first;
int currentDistance = priorityQueue.top().second;
priorityQueue.pop();
if (currentDistance > distances[current]) {
continue;
}
for (const auto& neighbor : graph.at(current)) {
int distance = currentDistance + neighbor.second;
if (distance < distances[neighbor.first]) {
distances[neighbor.first] = distance;
previousNodes[neighbor.first] = current;
priorityQueue.push({neighbor.first, distance});
}
}
}
return distances;
}
vector<string> shortestPath(const Graph& graph, const string& start, const string& goal) {
unordered_map<string, string> previousNodes;
dijkstra(graph, start, previousNodes);
vector<string> path;
for (string at = goal; !at.empty(); at = previousNodes[at]) {
path.push_back(at);
}
reverse(path.begin(), path.end());
return path;
}
int main() {
Graph graph = {
{"A", {{"B", 1}, {"C", 4}}},
{"B", {{"A", 1}, {"C", 2}, {"D", 5}}},
{"C", {{"A", 4}, {"B", 2}, {"D", 1}}},
{"D", {{"B", 5}, {"C", 1}}}
};
vector<string> path = shortestPath(graph, "A", "D");
for (const string& node : path) {
cout << node << " ";
}
cout << endl;
return 0;
}
function dijkstra(graph, start) {
let distances = {};
let previousNodes = {};
let priorityQueue = new PriorityQueue();
for (let vertex in graph) {
if (vertex === start) {
distances[vertex] = 0;
priorityQueue.enqueue(vertex, 0);
} else {
distances[vertex] = Infinity;
priorityQueue.enqueue(vertex, Infinity);
}
previousNodes[vertex] = null;
}
while (!priorityQueue.isEmpty()) {
let currentVertex = priorityQueue.dequeue().element;
for (let neighbor in graph[currentVertex]) {
let distance = distances[currentVertex] + graph[currentVertex][neighbor];
if (distance < distances[neighbor]) {
distances[neighbor] = distance;
previousNodes[neighbor] = currentVertex;
priorityQueue.enqueue(neighbor, distance);
}
}
}
return { distances, previousNodes };
}
function shortestPath(graph, start, goal) {
let { distances, previousNodes } = dijkstra(graph, start);
let path = [];
while (goal) {
path.push(goal);
goal = previousNodes[goal];
}
return path.reverse();
}
class PriorityQueue {
constructor() {
this.values = [];
}
enqueue(element, priority) {
this.values.push({ element, priority });
this.sort();
}
dequeue() {
return this.values.shift();
}
isEmpty() {
return this.values.length === 0;
}
sort() {
this.values.sort((a, b) => a.priority - b.priority);
}
}
let graph = {
'A': { 'B': 1, 'C': 4 },
'B': { 'A': 1, 'C': 2, 'D': 5 },
'C': { 'A': 4, 'B': 2, 'D': 1 },
'D': { 'B': 5, 'C': 1 }
};
console.log(shortestPath(graph, 'A', 'D'));
Applications of Dijkstra's Algorithm
- Network Routing: Finding the shortest path in network routing protocols such as OSPF.
- Map Services: Computing the shortest routes in map services like Google Maps.
- Robotics: Pathfinding in autonomous robots to navigate through environments.
- Game Development: Pathfinding for game AI to navigate through game worlds.
Advanced Topics and Optimizations
Bidirectional Dijkstra
Bidirectional Dijkstra runs two simultaneous searches: one forward from the source and one backward from the target. This can significantly speed up the search in large graphs.
Time Complexity
The time complexity of Dijkstra's Algorithm depends on the data structures used:
- Using a simple list:
- Using a binary heap (priority queue):
- Using a Fibonacci heap:
Handling Negative Weights
Dijkstra's Algorithm does not work with graphs that have negative weights. For such graphs, the Bellman-Ford Algorithm or Johnson's Algorithm can be used.
Path Reconstruction
To reconstruct the shortest path from the source to a target node, we can backtrack from the target node using the previous_nodes dictionary.
Conclusion
In this tutorial, we covered the fundamentals of Dijkstra's Algorithm, its implementation in Python, Java, C++, and JavaScript, and various optimizations and applications. Dijkstra's Algorithm is a powerful tool for finding the shortest path in graphs and is widely used in numerous domains. By mastering this algorithm, you can effectively solve a variety of shortest path problems in your projects.